串口通信傳輸格式和接收過程
串口通信傳輸格式:
串行通信中,線路空閑時,線路的TTL電平總是高,經反向RS232的電平總是低。一個數據的開始RS232線路為高 電平,結束時Rs232為低電平。數據總是從低位向高位一位一位的傳輸。示波器讀數時,左邊是數據的高位。
例如,對於16進製數據55aaH,當采用8位數據位、1位停止位傳輸時,它在信號線上的波形如圖1(TTL電平)和圖2(RS-232電平)所示。
55H=01010101B,取反後10101010B,加入一個起始位1,一個停止位0,55H的數據格式為1010101010B;
aaH=10101010B,取反後01010101B,加入一個起始位1,一個停止位0,55H的數據格式為1101010100B;
串口通信的接收過程:
(異步通信:接收器和發送器有各自的時鍾;同步通信:發送器和接收器由同一個時鍾源控製。RS232是異步通信)
(1)開始通信時,信號線為空閑(邏輯1),當檢測到由1到0的跳變時,開始對“接收時鍾”計數。
(2)當計到8個時鍾時,對輸入信號進行檢測,若仍為低電平,則確認這是“起始位”,而不是幹擾信號。
(3)接收端檢測到起始位後,隔16個接收時鍾,對輸入信號檢測一次,把對應的值作為D0位數據。若為邏輯1, 作
為數據位1;若為邏輯0,作為數據位0。
(4)再隔16個接收時鍾,對輸入信號檢測一次,把對應的值作為D1位數據。….,直到全部數據位都輸入。
(5)檢測校驗位P(如果有的話)。
(6)接收到規定的數據位個數和校驗位後,通信接口電路希望收到停止位S(邏輯1),若此時未收到邏輯1,說明出現 了錯誤,在狀態寄存器中置“幀錯誤”標誌。若沒有錯誤,對全部數據位進行奇偶校驗,無校驗錯時,把數據位從移 位寄存器中送數據輸入寄存器。若校驗錯,在狀態寄存器中置奇偶錯標誌。
(7)本幀信息全部接收完,把線路上出現的高電平作為空閑位。
(8)當信號再次變為低時,開始進入下一幀的檢測。
單片機常用11.0592M的的晶振,這個奇怪數字是有來曆的: 波特率為9600BPS每位位寬t1=1/9600s 晶振周期t2=1/11.0592/1000000S
單片機機器周期t3=12*t2 t1/t3=96
即對於9600BPS的串口,單片機對其以96倍的速率進行采樣。
如果單片機晶振用的不正確,會對串口接受產生誤碼。
RS485和RS422
RS485總線,在要求通信距離為幾十米到上千米時,廣泛采用RS-485 串行總線標準。RS485采用平衡發送和差分接 收,因此具有抑製共模幹擾的能力。加上總線收發器具有高靈敏度,能檢測低至200mV的電壓,故傳輸信號能在千米以外得到恢複。RS485采用半雙工工作方式,任何時候隻能有一點處於發送狀態,因此,發送電路須由使能信號 加以控製。RS485用於多點互連時非常方便,可以省掉許多信號線。應用RS485可以聯網構成分布式係統,其允許 最多並聯32台驅動器和32台接收器。
RS422總線,RS485和RS422電路原理基本相同,都是以差動方式發送和接受,不需要數字地線。差動工作是同速率 條件下傳輸距離遠的根本原因,這正是二者與RS232的根本區別,因為RS232是單端輸入輸出,雙工工作時至少需 要數字地線發送線和接受線三條線(異步傳輸),還可以加其它控製線完成同步等功能。RS422通過兩對雙絞線可 以全雙工工作收發互不影響,而RS485隻能半雙工工作,發收不能同時進行,但它隻需要一對雙絞線。RS422 和RS485在19kpbs下能傳輸1200米。用新型收發器線路上可連接台設備。
 |
從工業通信角度理解現場總線 |
| 工業通訊從最早的RS232硬件接口,然後是RS485,422,再然後是Canbus,DeviceBus,profitbus等串行接口,速度也從9.8kbps到1.2m,基本上滿足了現場控製端到執行檢測端的速度要求,很大程度的替代了原來的模擬量和數字量的的檢測和執行,對於單台設備,通訊距... |
 |
提高RS485總線通信可靠性的解決辦法 |
| 以RS485總線作為通信的應用也比較多,RS-485總線由於它的接口簡單、價格低廉、通信距離較長等優勢,在工業現... |
|
CAN總線通信錯誤類型與處理措施 |
| CAN總線通信錯誤類型與處理措施 在CAN總線中存在5種錯誤類型: 位錯誤: 向總線送出一位的某個節點同時也在監視總線,當監視到總線位的電平與送出的電平不同時9則在該位時刻檢測到一個位錯誤。但是在仲裁區的填充位流期間或應答間隙送出隱性位而檢測到顯性位... |
 |
can總線工作原理_can總線的數據傳輸原理 |
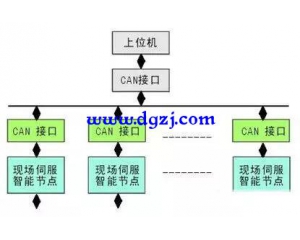
| CAN總線原理 CAN總線以廣播的方式從一個節點向另一個節點發送數據,當一個節點發送數據時,該節點的CPU把將要發送的數據和標識符發送給本節點的CAN芯片,並使其進入準備狀態;一旦該CAN芯片收到總線分配,就變為發送報文狀態,該CAN芯片將要發送的數據組成規... |
|
CAN的特點屬於串行通信網絡 |
| CAN的特點屬於串行通信網絡 1、通信方式靈活。多主從方式工作,網絡上任何節點均可以在任何時刻主動的向其他節點發送信息,不分主從無需站地址等節點信息可以構成多機備份係統 2、CAN網絡上的節點信息分成不同的優先級,可以滿足不同的實時要求 3、CAN采取非... |
- 提高RS485總線通信可靠性的解決辦法
- PROFIBUS的地址設定
- PROFIBUS的令牌傳遞
- profibus和profinet的區別及性能比較
- 西門子Profibus DP通訊故障診斷實用方法
- 微機常用接口和總線設計介紹
- can總線電壓是多少
- 電子開發中如何確定使用I2C總線還是SPI總
- DP通信協議詳解
- DP主站和從站設備類型
- PROFIBUSPA總線配置方案和硬件需求
- 寶馬汽車can總線故障排除實例分析
- 嵌入式係統CAN接口電路及軟件設計
- minipcie接口定義圖解
- Profibus總線幹擾類型及處理方法
- 寶馬汽車can總線測量方法
- can總線的工作原理及應用
- CAN總線協議基本規則
- CAN總線行車記錄儀設計和實現探討
- 嵌入式操作係統中斷機製詳解